Hình
2. Phương án sử dụng 6 cảm biến 3-2-1
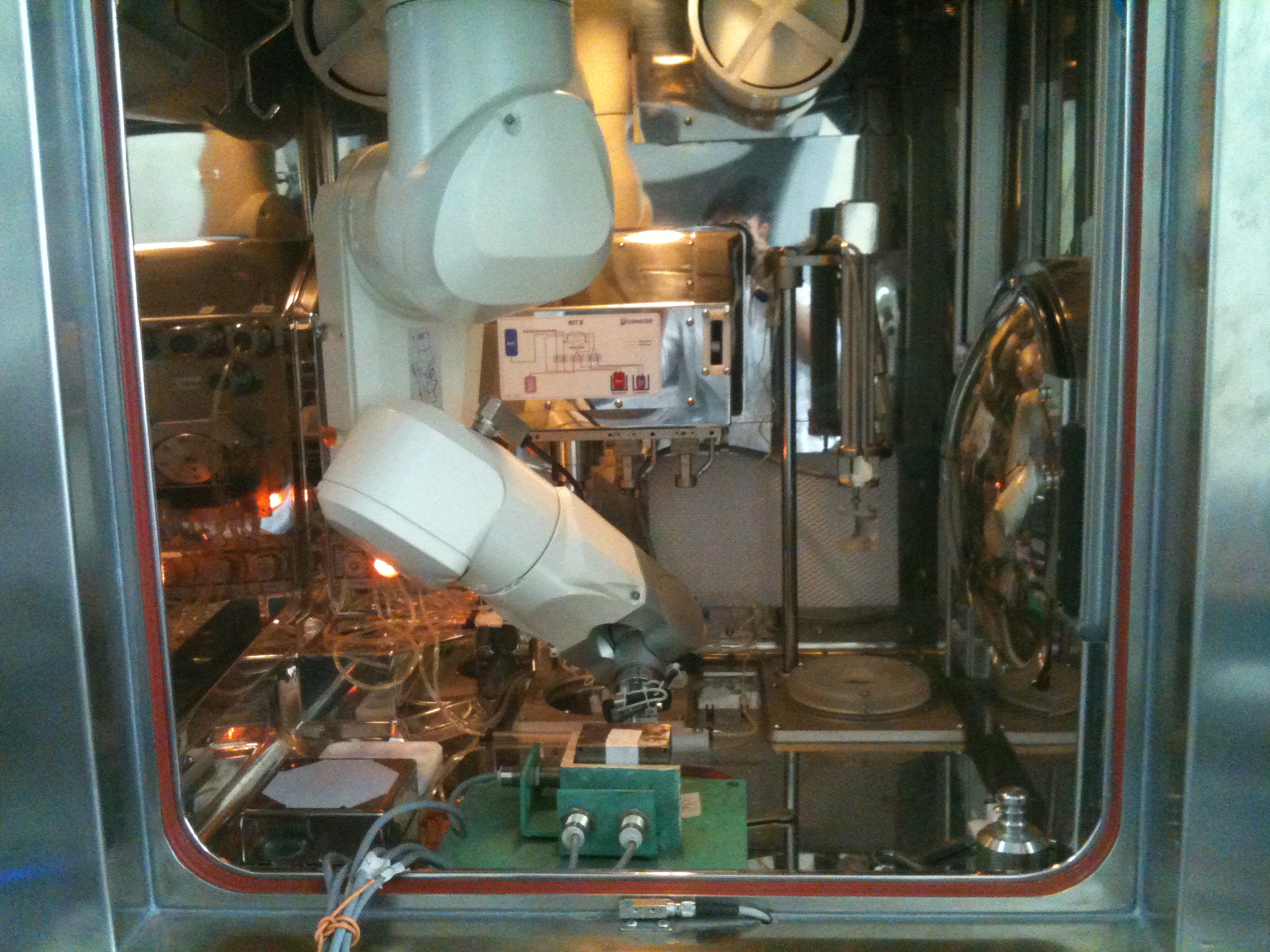
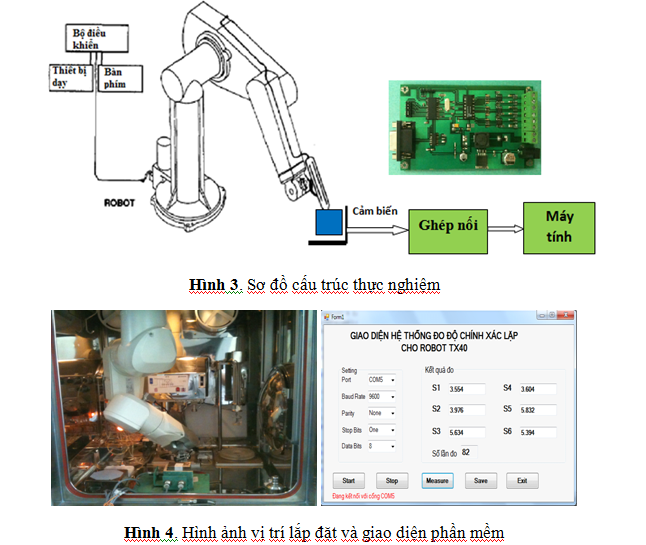
Hệ thống đo và phần mềm thu thập dữ liệu
Để thực hiện đo độ chính xác lặp của robot, tác giả đã thiết
kế một một hệ thống đo gồm: Giá âm bản bố trí các cảm biến điện từ không tiếp
xúc LD701-2/5. Card ADC-12bits để chuyển tín hiệu đo được từ các cảm biến về
máy tính. Phần mềm điều khiển đo và thu thập dữ liệu (Hình 3 và 4).
III. Kết quả và bàn luận
Thực hiện đo độ chính xác lặp cho robot ở các điều kiện tải
trọng là 0g, 500g và 1000g với tốc độ lần lượt là 5%, 20%, 40%, 60%, 80% với số
lần đo tại mỗi điểm làm việc là N=20. Hình 6 trình bày kết quả đo được về độ
chính xác lặp khi thay đổi tải trọng và tốc độ của robot.
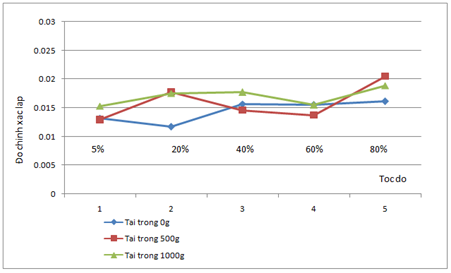
Hình
6.
Ảnh hưởng của tốc độ và tải trọng tới độ chính xác lặp của robot TX40
Các số liệu thực nghiệm thu được chỉ ra rằng: Khi tăng tốc
độ từ 5% đến 80% thì giá trị RPl tăng. Điều đó có nghĩa là độ chính xác
lặp của robot giảm. Nói một cách khác là có sự nghịch biến gữa tốc độ và độ
chính xác lắp.
Khi robot không mang tải (Tải trọng 0g) cho dù tốc độ tăng
lên đến 80% thì giá trị RPl vần không tăng đang kể và ở giá trị thấp
nhất so với trường hợp robot có mang tải (Tải trọng 500g và 1000g). Vậy có thể
khẳng định rằng robot mang tải trọng càng lớn, tốc độ càng lớn thì độ chính xác
lặp càng giảm. Tuy nhiên tốc độ và tải trọng ảnh hưởng tới độ chính xác lặp ở
mức độ khác nhau. Cụ thể là : Tốc độ ít hảnh hưởng tới độ chính xác lặp khi
robot không mang tải, khi mang tải và tốc độ trong khoảng 70-80% thì độ chính
xác lặp giảm đáng kể.
Kết quả thực nghiệm cũng chỉ ra rằng: Độ chính xác lặp tốt
nhất tương ứng với giá trị RPl = 0.0117mm khi robot không mang tải
và tốc độ 20% và kém nhất ứng với RPl = 0.0205mm khi robot mang tải 500g, tốc độ 80%. Trong
dải tốc độ từ 20% đến 60%, độ chính xác lặp ổn định và hầu như không bị ảnh
hưởng của tải trong. Vì vậy để đảm bảo độ chính xác lặp cao nhất nên đặt robot
làm việc ở tốc độ từ 20-60%.
IV. Kết luận
Tốc độ và tải trọng trong quá trình làm việc có ảnh hưởng
đáng kể tới độ chính xác lặp của robot Staubli-TX40 6 bậc tự do, đặc biệt khi
robot mang tải và chạy với tốc độ cao. Khi tăng tải trọng và tăng tốc độ cao
khoảng 80% thì độ chính xác lặp của robot giảm. Trong dải tốc độ từ 20% đến
60%, độ chính xác lặp ổn định và hầu như không bị ảnh hưởng của tải trong.
Hệ thống đo được sử dụng trong nghiên cứu này có thể sử dụng
để đo độ chính xác lặp của nhiều loại robot khác nhau. Kết quả của nghiên cứu
này cho phép tối ưu vận hành robot chia liều dược chất phóng xạ tại Trung tâm
Máy gia tốc 30MeV.
Tài
liệu tham khảo:
[1] Brethe. F and all: "Modelling of
repeatability phenomena using the stochastic ellipsoid approach, Robotica, Volum
24 Issue 4, July 2006.
[2]
ISO
9283, Manipulating industrial robots—performance criteria and related test
methods, International Standards Organization, 1998.